Python-Skript unterstützt Multi-Cam-3D-Messungen zur Entwicklung automatisierter Logistik- und Paket-Lösungen auf Basis von Intel® RealSense™-Geräten.
Das FRAMOS®-Entwicklerteam stellt auf GitHub ein Python-Beispielskript zur Verfügung, welches direkt mit mehreren Intel® RealSense™ -Kameras arbeiten kann, um Bounding Boxes für alle Arten von Objekten zu erstellen. Das Python-Skript von FRAMOS kann über den folgenden Link heruntergeladen werden:
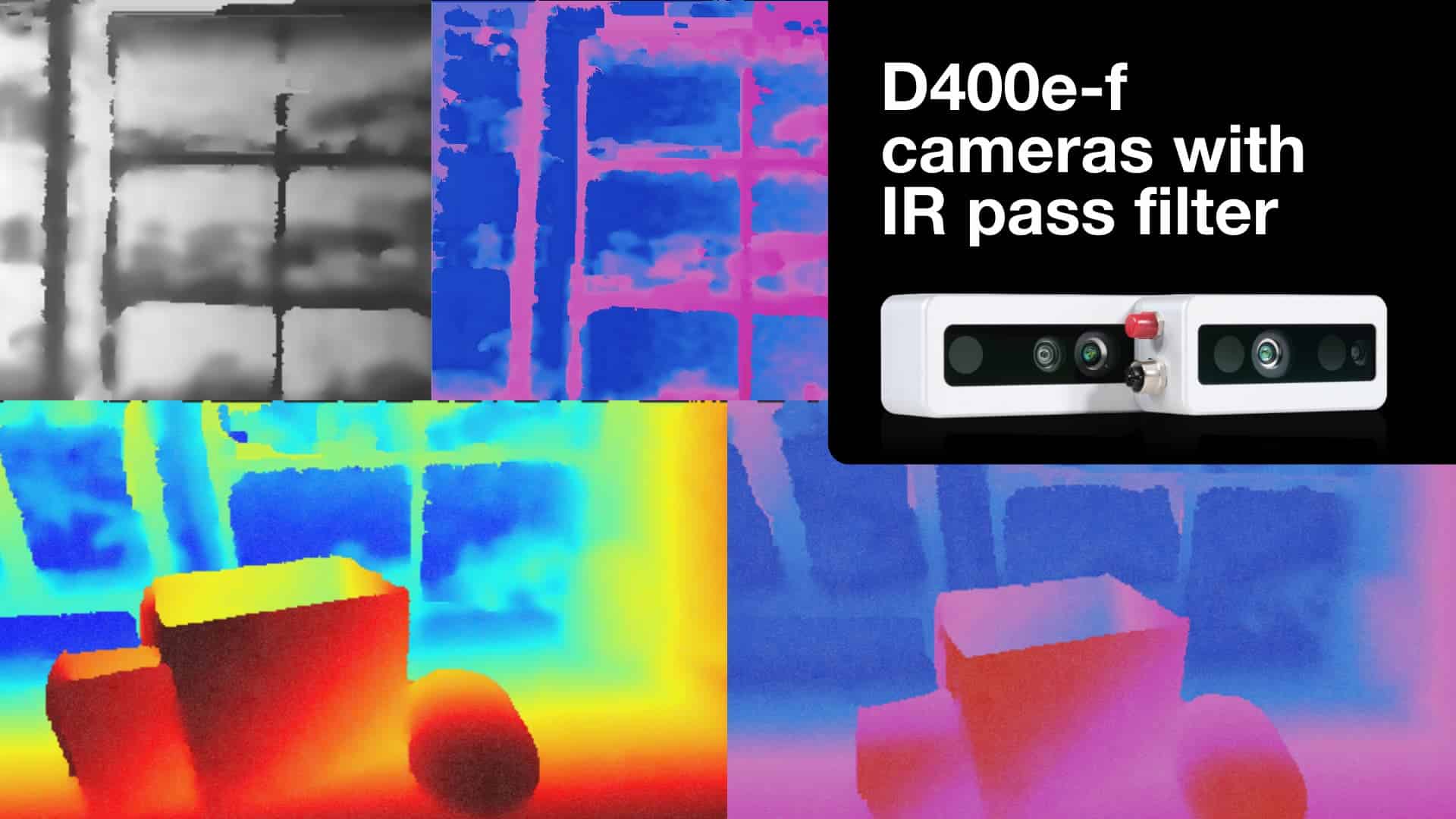
Die Intel® RealSense™-Kameras bieten praktische Lösungen zur Integration hochwertiger 3D-Technologie in Embedded-Geräte oder Stand-Alone-Applikationen. Hohe Bildauflösung, hohe Bildraten und der integrierte IR-Projektor ermöglichen innovative Anwendungen indoor oder outdoor. Die Tiefendaten werden auf einem dezidierten, integrierten ASIC-Prozessor verarbeitet, der RAW-Bildströme nutzt, um hochauflösende 3D-Tiefenkarten zu berechnen. Für diese 3D-Tiefenkarten wird kein dedizierter GPU oder Host-Prozessor benötigt. Die 3D-Kameras und -Module sind mit einem SDK für Windows, Linux und weitere Plattformen verfügbar und bieten sowohl Code, Debugging-Tools und Evaluierungsprogramme.
Das neu veröffentlichte Python-Skript für Intel® RealSense™-Geräte basiert auf FRAMOS’ fundierter Expertise mit 3D-Lösungen in der Industrie- und Logistikautomatisierung. Dieses Wissen ist in das Skript eingeflossen, um Entwicklern ein Beispiel an die Hand zu geben, schnell und unkompliziert 3D-Systeme und Bounding Boxes zu erstellen. Als erster Schritt, um etwa um Versandraten und Preise im Paket- und Postbereich zu berechnen, Packstücken die passenden Lagerplätze zuzuweisen und Objekte basierend auf ihrem Volumen zu sortieren. Diese Art Anwendungen profitieren von der 3D-Messung, um das Gesamtvolumen zu minimieren, die Frachtkosten zu senken; oder, um Versand und Lager zu vereinfachen und zu optimieren. Entwickler, die Systeme im Post-, Lager- oder Sortierbereich erstellen, können mit dem Skript große Vorteile in ihren Anwendungen erzielen. Dies gilt insbesondere für diejenigen, die eine auf mehreren Kameras basierende Anwendung planen.